
티스토리 뷰
1.1 Control Systems
컨트롤 시스템 엔지니어링은 매우 중요하다. 과거의 거의 대부분 컨트롤들은 기계적으로 수행되었지만, 현대에 가까워질 수록 전자적인 부분이 부각되고 있다.
보통의 시스템은 정의된 입력과 출력, 그리고 블랙박스(내부를 알 수 없는)로 구성되어 있다.

입력신호에 대한 변화는 출력신호에 영향을 끼치게 된다. 보통, 입력과 출력 신호들은 위치, 속도나 온도와 같은 물리적인 신호로 구성된다.
히터가 설치된 방을 예시로 들면, 입력은 히터에서 만들어진 열 이고, 출력은 방의 온도로 나타낼 수 있다.

컨트롤 시스템은 출력이 입력 명령(input command)를 추종하는 것을 보장한다. 따라서 어떤 변수가 컨트롤의 대상이 되는지에 대해 명확히 정의하는 것이 필수적이다. 때때로 컨트롤의 대상이 되는 시스템은 플랜트(a plant)라고 명칭되기도 한다.
다음은 간단한 컨트롤 시스템의 컨셉을 나타낸다.

1.2 Feedback Control
컨트롤 시스템 엔지니어링에서 가장 비중있게 다뤄지는 개념은 피드백(feedback)이다. 모든 시스템이 피드백의 기능을 가지는 것은 아니지만, 거의 대부분이 피드백 시스템에 해당한다.
다음의 개루프(open-loop)컨트롤 시스템을 고려해보자.

개루프 컨트롤 시스템에서 컨트롤러는 명령어(command)를 수신하고, 입력값에 대한 제어 신호(Control signal)을 계산한다. 제어의 대상이 되는 시스템(Controlled system)에 대한 완벽한 이해가 동반되었을때, 이 시스템은 의도한 대로 동작할 것이다.
그러나, 어떤 시스템에서나 불확정성(uncertanity)이 존재하기 때문에 이러한 가정은 실용적이지 못하다. 우리는 개루프 시스템을 피드백을 통해 수정하고 다뤄볼 수 있다.
다음은 피드백 컨트롤(Feedback Control)을 나타낸다.
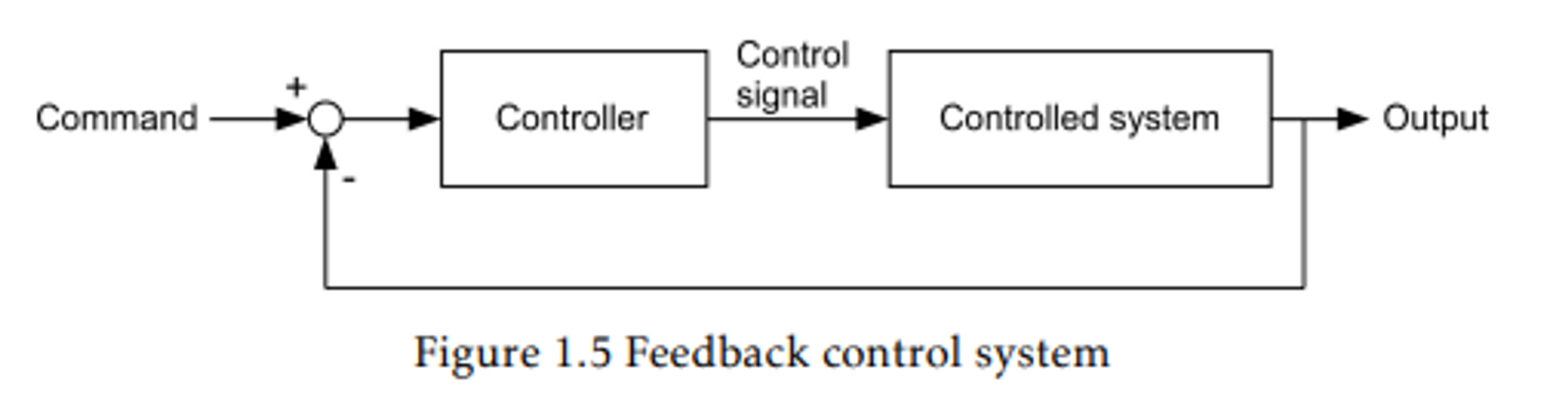
피드백이 존재하는 시스템에서 컨트롤러는 실제 출력(actual output) 과, 목표 출력(Commanded output)을 입력받아 비교하게 된다. 이 비교과정에서 오차(error)가 발생된다면, 컨트롤러는 오차를 줄이는 방향으로 시스템을 구동하게 된다. 이러한 피드백 컨트롤은 불확정성이 존재하는 상황에서도 실제 출력이 목표 출력을 추종한다는 것을 보장한다.
피드백은 제어 시스템에서만 국한되어 사용되는 것은 아니다. 다음은 궤환 회로를 포함하는 반전 증폭기를 나타낸다.

1.3 The Time-Dopmain and Frequency-Domain
피드백 컨트롤 시스템을 분석하거나, 컨트롤러를 디자인하기 위해서 시스템을 수학적으로 모델링하는 것이 필수적이다. 이 작업은 시간 도메인 혹은 주파수 도메인에서 수행될 수 있다. 시간 도메인 모델링은 미분 방정식을 보통 사용한다. 다음의 간단한 RC 회로를 고려해보자. u(t) 와 y(t)가 각각 입력전압과 출력전압이라고 하자.

이 회로는 다음과 같이 시스템으로써의 역할을 수행할 수 있다.

다음의 방정식은 입력신호 u(t)와 출력신호 y(t)의 관계를 나타낸다.

주어진 입력신호 u(t)에 대한 출력신호 y(t)를 찾기 위해 위 방정식을 풀어야 한다. 이 방정식을 풀게 되면, 시간 t 에서 주어진 입력에 대한 출력을 만들어 낸다. 만약 우리가 시간에 대한 함수를 변화시킨다면(transform), 변화된 변수에 대한 변화된 함수를 구할 수도 있다.
많은 수학적 변환 중 라플라스 변환은 엔지니어링 분야에서 가장 많이 사용되는 변환이다.
원 함수와, 라플라스 변환된 함수 사이에는 1대 1 대응관계가 존재한다. 우리가 시간에 대한 함수를 변환시켰을 때 가장 흔하게 사용되는 변수는 주파수에 대한 변수이다. 이를 통해 우리는 주파수 도메인에 접근할 수 있다. 이러한 변환은 시간도메인에서 누락되는 다양한 주파수 도메인에 대한 정보를 만들어 낸다. 다음은 시간과 주파수 도메인의 관계에 대해 나타낸다.

참고문헌 : Control Systems Engineering: Design and Implementation using Arm Cortex-M Microcontrollers
- Total
- Today
- Yesterday
- 제어
- abstraction
- interrupt
- hardware
- Configuration
- 입출력
- 라이브러리
- 제어기초
- 아두이노
- 맥슨모터
- MAXON
- 인터럽트
- GPIO
- 하드웨어
- serial1
- epos4
- 식별자
- Microcontroller
- D/Aconverter
- hal
- gitignore
- 추상
- 환경구성
- epos
- 하드웨어추상계층
- arduino
- layer
- vscode
- STM32
- 마이크로컨트롤러
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |